PODSTAWY MATEMATYCZNE
Algebra wektorów
Wektor – obiekt posiadający trzy cechy: wartość, kierunek i zwrot.
Chociaż wektorowi można przypisać punkt przyłożenia, to punkt przyłożenia nie stanowi jego cechy. W opisie wektora istnieje umowa, że jego początek znajduje się w początku układu współrzędnych. Dlatego jednoznaczny opis wektora ogranicza się do podania współrzędnych końca wektora.
W niniejszym podręczniku procesy opisywane są w
przestrzeni trójwymiarowej, w układzie kartezjańskim, czyli w układzie trzech
wzajemnie prostopadłych osi. Istnieją różne konwencje zapisu takich wektorów.
Najbardziej lapidarny opis, to trzy zapisane w odpowiedniej kolejności liczby
stanowiące rzuty końca wektora na poszczególne osie. Na przykład: [1,2,3] to
wektor, którego koniec posiada następujące współrzędne: x=1, y=2, z=3. Jeżeli
wektor ewoluuje, wówczas jego składowe są funkcjami czasu: [x(t),y(t),z(t)].
Można również stosować zapis naturalny, co oznacza, że określony wektor ![]() może być przedstawiony jako suma swoich składowych:
może być przedstawiony jako suma swoich składowych:
![]()
W opisie tym litery i-j-k oznaczają wersory, czyli wektory jednostkowe. Wektor jednostkowy to iloraz wektora przez jego wartość.
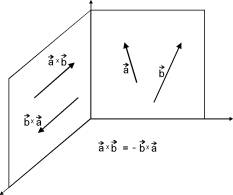
Iloczyn wektorowy
Wynikiem mnożenia wektorowego jest wektor o kierunku prostopadłym do płaszczyzny wyznaczanej przez wymnażane wektory, natomiast zwrot określa się z reguły śruby prawoskrętnej.
Regule
prawoskrętnej ulegają też iloczyny wersorów, np.: ![]()
Moduł wyniku mnożenia
wektorowego to iloczyn wartości wektorów i sinusa kąta pomiędzy nimi. Należy
zauważyć, że ![]()
Przykład mnożenia wektorowego:
![]()
![]()
![]()
|
|
Określanie zwrotu iloczynu wektorowego |
Iloczyn skalarny
Wynikiem mnożenia skalarnego jest wielkość skalarna stanowiąca iloczyn wartości wektorów i cosinusa kąta pomiędzy nimi.
Należy zauważyć, że ![]() , natomiast iloczyny mieszane wersorów wynoszą zero.
, natomiast iloczyny mieszane wersorów wynoszą zero.
Funkcje zespolone
Zespolone liczby, uporządkowane pary
liczb rzeczywistych (a, b), w zapisie
![]()
dla których zdefiniowana
jest relacja równości oraz określone są przemienne i łączne działania
dodawania i mnożenie. Element urojony i ma tę własność, że ii=-1, albo ![]()
![]()
![]()
![]()
![]()
Podczas
dzielenia należy dzielną i dzielnik pomnożyć przez sprzężony dzielnik. Liczba
sprzężona ![]() ’ liczby zespolonej
’ liczby zespolonej ![]() to
to ![]()
![]()
W geometrii na
płaszczyźnie liczba zespolona (jako para liczb) jest interpretowana jako wskaz
należący do tzw. płaszczyzny zespolonej. Długość tego wskazu, zwana jest
modułem liczby zespolonej.
Liczby zespolone
zapisywane są w postaci algebraicznej, trygonometrycznej i wykładniczej.
Składniki liczby zespolonej mogą być funkcjami, np. czasu.
Przed mnożeniem i
dzieleniem liczb zespolonych – warto przekształcić je do postaci wykładniczej
Iloraz różnicowy
Iloraz różnicowy wyrażony zależnością 11.3 geometrycznie stanowi współczynnik kierunkowy siecznej dwóch punktów na wykresie funkcji f(t), punktów o współrzędnych: [t, f(t)] oraz [t+Dt, f(t+Dt)]
|
|
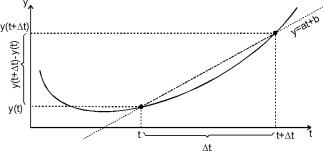
Graficzna interpretacja
ilorazu różnicowego a.
a=![]()
Pochodna
Pochodna stanowi granicę ilorazu różnicowego przy Dt®0 i jest wyrażona zależnością 11.4. Jej geometryczny wyraz to współczynnik kierunkowy stycznej do wykresu funkcji f(t.
|
|
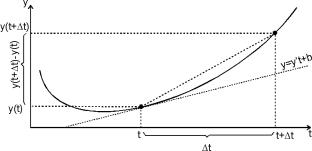
Rys. 11.3. Graficzna
interpretacja pochodnej y’.
y’=![]()
W kinematyce ilorazem różnicowym jest np. szybkość średnia, a pochodną – szybkość.
Przykłady pochodnych funkcji elementarnych:
( a tn )’ = a n tn-1
(sint)’ = cost
(cost)’ = -sint
![]()
(et)’ = et
Należy pamiętać o następujących zasadach (obowiązujących gdy funkcje f i g są różniczkowalne, a prawe strony wymienionych niżej relacji posiadają sens matematyczny):
Pochodna sumy (różnicy) dwóch funkcji to suma (różnica) pochodnych.
Pochodna iloczynu funkcji f oraz funkcji g: (f×g)’=f’×g+f×g’
Pochodna ilorazu
funkcji f oraz funkcji g: (f/g)’=(f’×g - f×g’)
/g2
Pochodna funkcji złożonej [F(f(t)]’ = F’×f’
Całka nieoznaczona
Obliczanie całki nieoznaczonej to znajdowanie funkcji pierwotnej względem różniczkowania (znajdowania pochodnej). Do wyniku całkowania należy dodać dowolna stałą. Jedną z istotnych w fizyce (szczególnie w dynamice) umiejętności jest identyfikacja fizykalnego znaczenia stałej całkowania. Przykładem całki nieoznaczonej jest szybkość liczona jako całka z wartości wektora przyspieszenia stycznego albo droga jako całka z szybkości.
Przykłady całek funkcji elementarnych:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Należy pamiętać o zasadzie, iż całka sumy (różnicy) dwóch funkcji to suma (różnica) całek tych funkcji, oraz o tym, iż całka z iloczynu dwóch funkcji może być policzona metodą tzw. „przez części”.
Całka oznaczona
Całka oznaczona z funkcji f(t), czyli liczona w określonych granicach od t1 do t2, interpretowana jest jako powierzchnia na wykresie tej funkcji ograniczona od góry przebiegiem funkcji, od dołu osią odciętych, a boków - prostymi t = t1 od lewej oraz t = t2 od prawej.
|
|
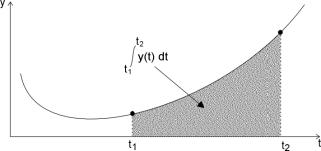
Interpretacja geometryczna
całki oznaczonej.
Przykładem całki oznaczonej jest praca siły F(s) na
drodze od s1 do s2.
Zbigniew OTREMBA 2004